オリジナル論文☜下記タイトルをクリック
Developments of a centimeter-level precise muometric wireless navigation system (MuWNS-V) and its first demonstration using directional information from tracking detectors
Scientific Reports volume 14, Article number: 7605 (2024) Cite this article
- 950 Accesses
- 3 Altmetric
- Metricsdetails
Abstract
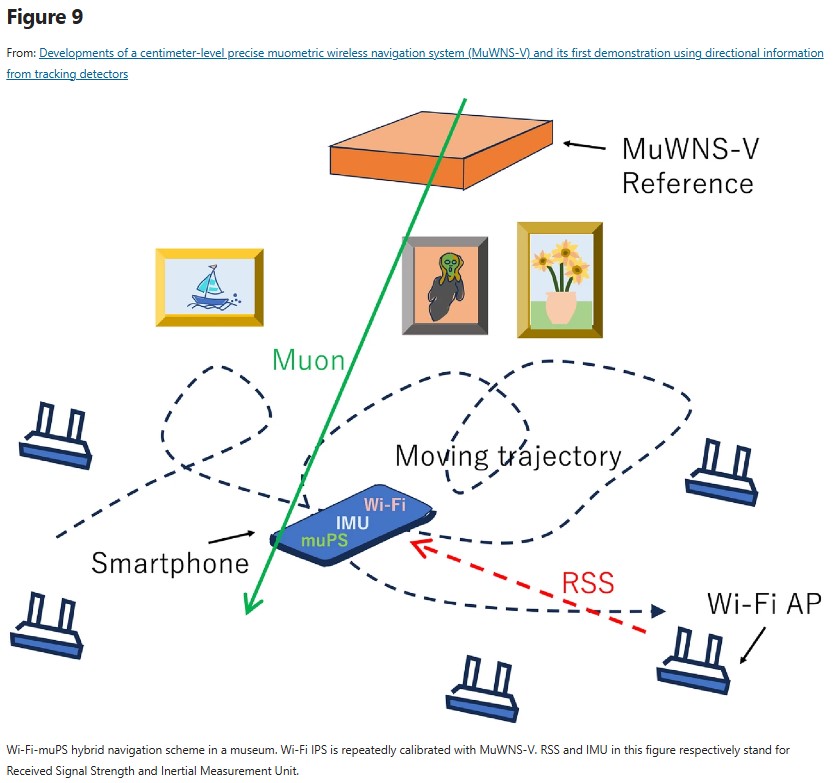
Various positioning techniques such as Wi-Fi positioning system have been proposed to use in situations where satellite navigation is unavailable. One such system, the muometric positioning system (muPS), was invented for navigation which operates in locations where even radio waves cannot reach such as underwater or underground. muPS takes advantage of a key feature of its probe, cosmic-ray muons, which travel straightforwardly at almost a speed of light in vacuum regardless of the matter they traverse. Similar to other positioning techniques, muPS is a technique to determine the position of a client’s muPS receiver within the coordinate defined by reference detectors. This can be achieved either by using time-of-flight (ToF) or angle of arrival (AoA) measurements. The latter configuration (AoA), called the Vector-muPS has recently been invented and the present paper describes the developments of the first prototype of a vector muometric wireless navigation system (MuWNS-V) with this new vector-muPS concept and its demonstration. With MuWNS-V, the reference tracker and the receiver ran wirelessly with fully independent readout systems, and a positioning accuracy of 3.9 cm (RMS) has been achieved. We also evaluated the outcome of measuring continuous indoor localization of a moving receiver with this prototype. Our results indicated that further improvements in positioning accuracy will be attainable by acquiring higher angular resolution of the reference trackers. It is anticipated that “sub-cm level” navigation will be possible for muPS which could be applied to many situations such as future autonomous mobile robot operations.
日本語訳
Wi-Fi測位システムなど、衛星ナビゲーションが利用できない状況で使用するために、さまざまな測位技術が提案されています。その一つが、muometric positioning system(muPS)であり、無線電波さえ届かないような水中や地下などでのナビゲーションのために発明されました。muPSは、そのプローブの主要な特徴である宇宙線ミュー粒子を利用しています。ミュー粒子は、通過する物質に関係なく、真空中でほぼ光速で直進します。他の測位技術と同様に、muPSは基準検出器によって定義された座標内でクライアントのmuPS受信機の位置を特定する技術です。これは、飛行時間(ToF)や到来角度(AoA)測定を使用して達成できます。後者の構成(AoA)は、Vector-muPSと呼ばれ、最近発明されました。本論文では、この新しいVector-muPSコンセプトを用いたベクトルミューメトリック無線ナビゲーションシステム(MuWNS-V)の最初のプロトタイプの開発とそのデモンストレーションについて説明します。MuWNS-Vでは、基準トラッカーと受信機は無線で完全に独立した読み取りシステムを使用して動作し、3.9 cm(RMS)の位置精度を達成しました。また、このプロトタイプを使用して、移動する受信機の連続的な屋内位置測定の結果も評価しました。結果は、基準トラッカーの角度分解能を向上させることで、位置精度のさらなる改善が可能であることを示唆しています。将来的には、自律移動ロボットの操作など、さまざまな状況に応用できる「サブセンチメートルレベル」のナビゲーションがmuPSで実現できると期待されています。