


分子ロボティクス研究コミュニティでの共同研究の成果として生まれた世界初の「分子群ロボット」。その発展プロジェクトとして現在取り組んでいるのが、「生体材料を使った分子人工筋肉」の開発です。国立研究開発法人新エネルギー・産業技術総合開発機構(NEDO)の「次世代人工知能・ロボット中核技術開発」事業に基づいて行われている、東京工業大学(小長谷明彦先生)・産業総合技術研究所(上野豊先生、石原司先生)・北陸先端科学技術大学院大学(平塚祐一先生)・大阪大学(森島圭祐先生)・北海道大学(角五彰先生)、そして私たちの6グループによる共同プロジェクトは、微小管–キネシン分子モーター系をDNAで組み立てて、ミニチュアサイズの化学エネルギーで駆動するアクチュエータを開発することを目標としています。
私たちが体を動かすために使っている骨格筋では、繊維状のアクチンーミオシン分子モーター系が交互に規則正しく配列し、サルコメアと呼ばれる特徴的な構造を形成することで、速くて強い収縮を実現しています。そこで私たちは、分子群ロボットでも使用した細胞内で輸送網として働いているもうひとつの分子モーター系である微小管ーキネシンの組み合わせで、「人工サルコメア」をつくろうとしているのです。「アクチンフィラメントは細くて柔らかい。微小管は太くて固い」という、分子生物学における細胞骨格の常識からすれば、微小管から組み立てた人工サルコメアは、天然のサルコメアよりもさらに強い力が取り出せるのではないか、と期待しています。
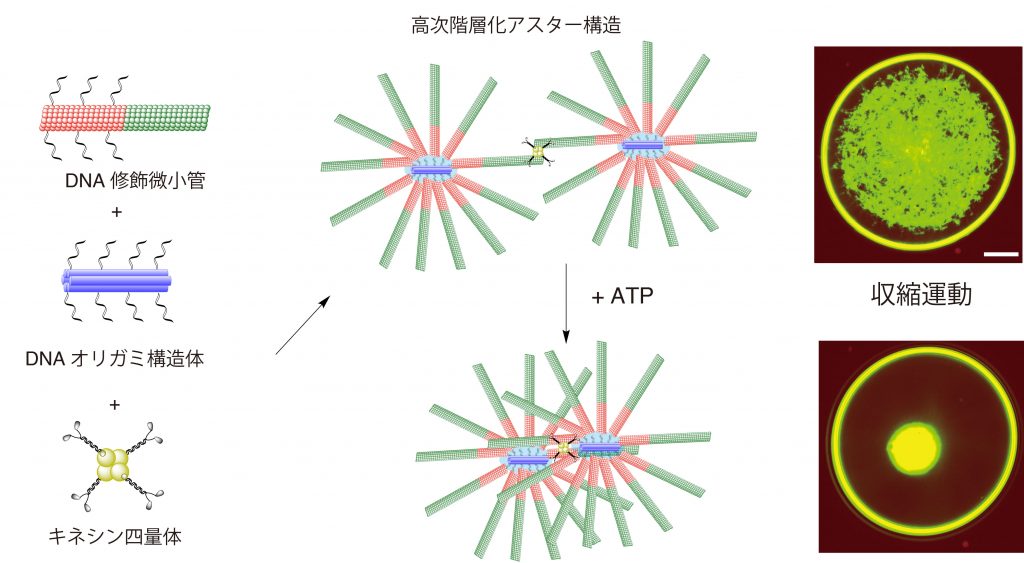
イノベーション創生センターにて、2016年10月から取り組みはじめたこのプロジェクト。北海道大学・関西大学チームのこれまでの成果として、世界で初めてDNAオリガミ構造体を介して微小管を集合化させることで、私たちの体をつくるもう一種の筋肉である「平滑筋」(主に胃や腸、血管などの内臓を動かすために使われています)を模倣した分子人工筋肉が開発されています(Nano Lett. 2019, 19, 3933-3938、特願2018-107494)。
→プレスリリース(2019年5月7日)
→日刊工業新聞電子版の記事
→講談社ブルーバックスウェブサイト
機械式のモーターでは実現できないミクロンサイズの「分子人工筋肉」が開発できれば、脳の血管の中を通さなければならない極細(よく使われるのは直径500 µm程度です)のマイクロカテーテルであっても、360°手元の操作で自在に曲げることができる「マイクロ自在カテーテル」がつくれるかもしれません。血管内を望み通りに移動し、これまで到達することのできなかった部位での治療を可能とするような、そんな未来の医療器具を夢見て、私たちは研究に取り組んでいます。