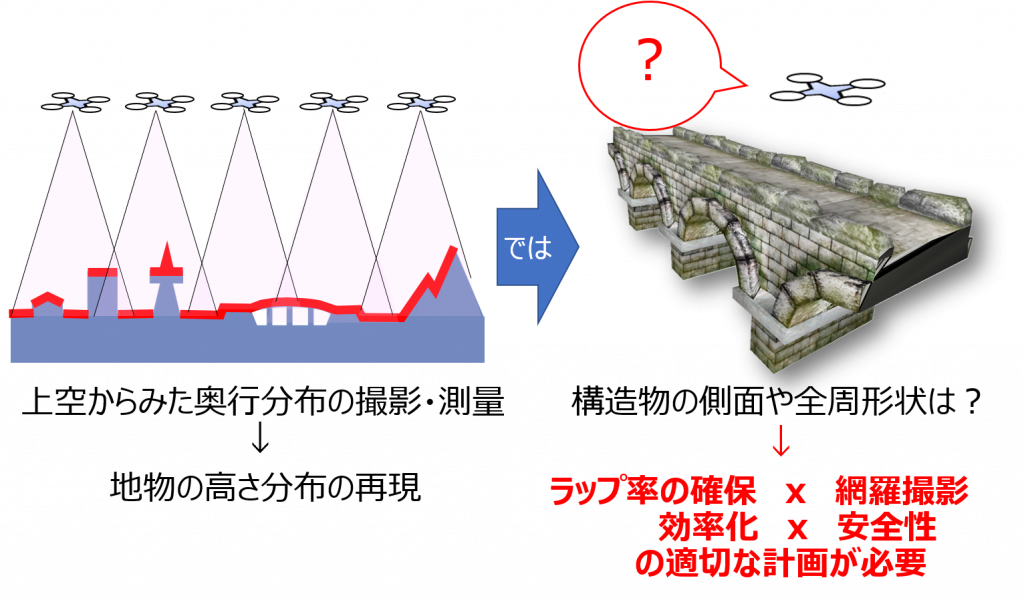
近年,屋外構造物の調査や3元モデル化のために,ドローンでの空撮が多く用いられているが,その飛行ルートは主に平面図で立案され,対象物の高さ方向の急峻な変化に対応するには,操縦者の技量に頼るところが大きい.本研究では,対象の立体形状に適したドローンの3次元飛行経路計画に取り組む.数理計画法を用いた最適化により,ラップ率や解像度を担保した安全な飛行経路を自動算出する手法を創出する.
KANSAI UNIVERSITY
近年,屋外構造物の調査や3元モデル化のために,ドローンでの空撮が多く用いられているが,その飛行ルートは主に平面図で立案され,対象物の高さ方向の急峻な変化に対応するには,操縦者の技量に頼るところが大きい.本研究では,対象の立体形状に適したドローンの3次元飛行経路計画に取り組む.数理計画法を用いた最適化により,ラップ率や解像度を担保した安全な飛行経路を自動算出する手法を創出する.